Diplomarbeiten 2023/24
Diplomarbeiten 2022/23

PictoBot Lernroboter und Vision Tracker
Die Diplomarbeit "PictoBot-Lernroboter und Vision Tracker" zeigt, wie einfach man einen Roboter programmieren kann.
mehr
Pacemaker V8 - Roboter zum Lauftraining
Elektronik-Maturanten entwickeln Roboter, der einem beim Lauftraining unterstützt.
mehrDiplomarbeiten 2021/22

Elektronik-Maturanten automatisieren Kalibirierung
Für den Auftraggeber wurde ein Prüfstand für Ultraschall- Durchflussmesser entwickelt, welcher die genaue Kalibrierung dieser Messgeräte ermöglicht.
mehrTranslating Glove
Elektronik-Maturanten entwickeln Handschuh, welcher das Gebärdenalphabet aufnimmt und weiterverarbeitet.
mehr
Air Hockey Roboter
Das Ziel dieser Arbeit war es, einen Air-Hockey-Tisch aufzubauen, bei welchem ein Mensch gegen einen intelligenten Roboter spielt.
mehrDiplomarbeiten 2020/21
Humanoider Roboter

Humanoider Roboter
Daniel Ekker, Jan Hagenauer und Max Peschek entwickeln einen humanoiden Roboter.
mehrDiplomarbeiten 2018/19
Vollautomatisches Logistikhaus
Robert Garger, Thomas Garger und Florian Hofstädter entwickeln vollautomatisches Logistikhaus.
mehr
Roboterbar und Robotino
„Roboterbar“ und „Mobiler, autonomer Roboter“ als typisches „Industrie 4.0-Projekt“
mehrDiplomarbeiten 2017/18
Roboterplattformen
Sarah Lang, Isabella Jemetz und Tobias Glösl entwickeln 10 Roboterplattformen.
mehrDiplomarbeiten 2016/17

Diplomarbeiten 2015/16
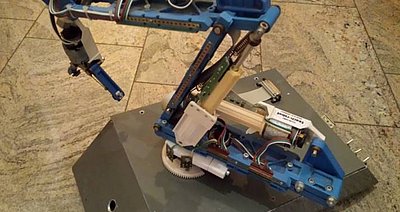
Greifarm-Roboter
Steuerung eines Greifarmroboters über einen PlayStation-Controller. Der Greifarmroboter kann autonom oder am Pflegeroboter CARRIER montiert betrieben...
mehr
Diplomarbeiten 2014/15
Pflegeroboter
Es wird die Plattform für einen Pflegeroboter gebaut. Diese enthält neben dem mechanischen Aufbau mit einem Differentialantrieb einen Laptop,...
mehr
iBoogle - Bühnenroboter
Ein Rasenmäherroboter wird zu einem Bühnenroboter umgebaut, der über ein Keyboard gesteuert werden kann.
mehr